目录
- 一. 边缘检测
- 1. 边缘的定义
- 2. Sobel算子 边缘提取
- 3. Scharr算子 边缘提取
- 4. Laplacian算子 边缘提取
- 5. Canny 边缘检测算法
- 5.1 计算梯度的强度及方向
- 5.2 非极大值抑制
- 5.3 双阈值检测
- 5.4 抑制孤立弱边缘
- 二. 轮廓信息
- 1. 获取轮廓信息
- 2. 画轮廓
一. 边缘检测
1. 边缘的定义
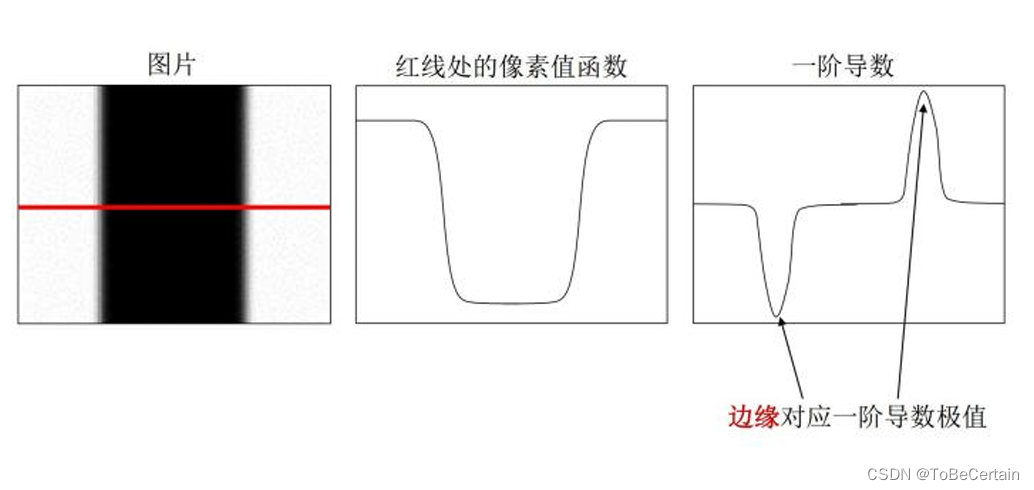
边缘:像素值快速变化的区域,也就是像素值函数一阶导数的极值区域
边缘信息:像素值明显变化的区域, 具有非常丰富的语义信息,常用于物体识别等领域
2. Sobel算子 边缘提取
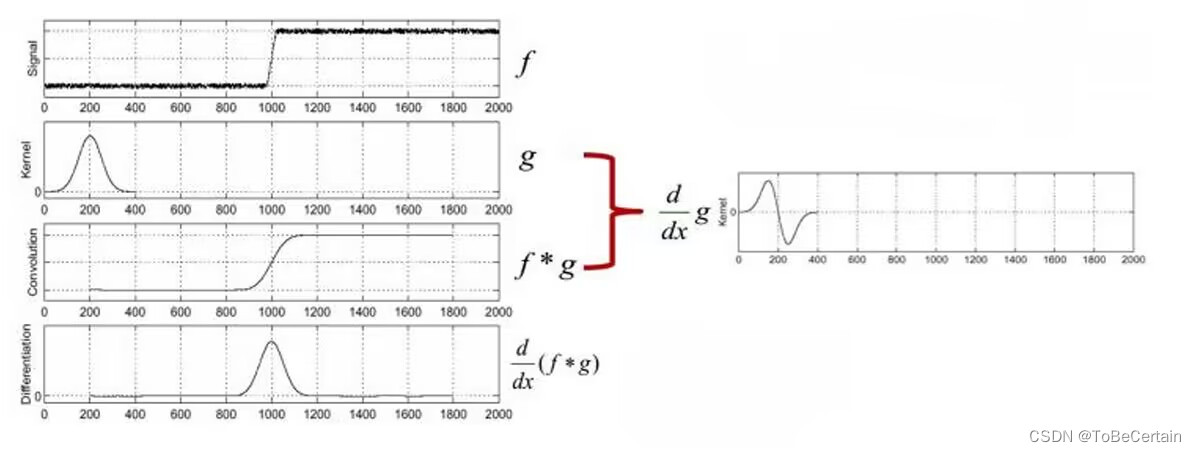
Sobel滤波作用:相当于先高斯去燥,再使用一阶导数获取极值
导数对噪声非常敏感
语法
方法1:
cv2.Sobel(src, ddepth, dx, dy[, ksize[, scale[, delta[, borderType]]]])
参数:
src:表示输入图像,即待处理的原始图像
ddepth:表示输出图像的深度,当其值为负时(通常取-1),输出图像与输入图像有相同的深度
dx:表示x方向上的求导阶数,若想计算水平方向的边缘,则设置为1
dy:表示y方向上的求导阶数,若想计算垂直方向的边缘,则设置为1
ksize:Sobel核的大小,默认为3,即3x3的矩阵
如果该值为-1,则会使用Scharr算子进行运算
scale:计算导数值时所采用的缩放因子,默认情况下该值是1,即无缩放
delta:在结果中加入的一个可选的常数项,用于调节输出图像的亮度
borderType:像素外推法选择项,用于处理图像边缘的像素
作用:计算图像的一阶导数,通常用于边缘检测
方法2:
cv.filter2D()函数
d
d
x
(
f
∗
g
)
=
f
∗
d
d
x
g
\frac{d}{d x}(f * g)=f * \frac{d}{d x} g
dxd(f∗g)=f∗dxdg
-
SobelX:水平梯度/垂直边缘,提取垂直的边缘信息
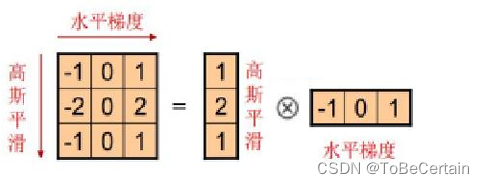
经过SobelX提取的边缘信息为:

-
SobelY:垂直梯度/水平边缘,提取水平的边缘信息
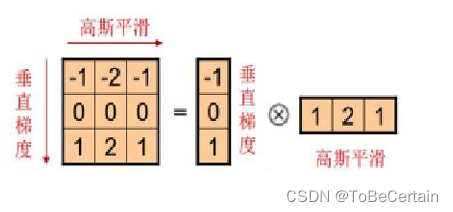
经过SobelY提取的边缘信息为:

3. Scharr算子 边缘提取
Scharr是Sobel算子的改进版,具有更好的性能和更高的精度
4. Laplacian算子 边缘提取
Δ s r c = ∂ 2 s r c ∂ x 2 + ∂ 2 s r c ∂ y 2 \Delta s r c=\frac{\partial^{2} s r c}{\partial x^{2}}+\frac{\partial^{2} s r c}{\partial y^{2}} Δsrc=∂x2∂2src+∂y2∂2src
cv2.Laplacian(src, ddepth, ksize, scale=1, delta=0, borderType=BORDER_DEFAULT)
参数:
src:表示原始输入图像
ddepth:表示目标图像的深度
ksize:
用于计算二阶导数的核(kernel)尺寸大小
必须是正的奇数
如果该参数未指定,则默认使用3x3的核
scale:表示计算Laplacian值的缩放比例因子,该参数是可选的
默认情况下,该值为1,表示不进行缩放
delta:表示加到目标图像上的可选值,默认为0
borderType:表示像素外推法选择项,用于处理图像边界
作用:Laplacian滤波器在图像处理中常用于边缘检测和增强
效果:
块团检测:周边高于或者低于中心点的区域
边缘检测:像素值快速变化的区域
特点:二阶微分算子作为梯度值
不同点:与Sobel和Scharr滤波器不同,Laplacian滤波器对图像中的突变(即边缘)更加敏感,因为它使用的是二阶导数
5. Canny 边缘检测算法
Canny边缘检测算法是从不同视觉对象中提取有用的结构信息,是传统计算机视觉中非常广泛应用的一种边缘提取算法
语法:
cv2.Canny(image, threshold1, threshold2[, apertureSize[, L2gradient]])
参数:
image:表示要进行边缘检测的输入图像
threshold1:第一个阈值,用于边缘连接,较小的值会导致更多边缘被检测到
threshold2:第二个阈值,用于检测强边缘,较大的值将导致仅检测到强边缘
apertureSize:可选参数,表示Sobel算子的孔径大小,默认值为3
L2gradient:可选参数,表示是否使用L2范数计算梯度幅值,默认值为False
Canny边缘检测算法通过以下步骤实现:
使用高斯滤波平滑图像,减少图像中的噪声
计算图像的梯度幅值和方向
对梯度幅值应用非最大抑制,以得到细化的边缘
使用两个阈值(threshold1和threshold2)来确定潜在的边缘
通过抑制孤立的弱边缘,最终得到边缘检测结果。
作用:
Canny算法能够有效地识别图像中的弱边缘和强边缘,并结合它们的位置关系,给出图像整体的边缘信息
由于其优越的性能,Canny算法是目前最常用的边缘检测算法之一
5.1 计算梯度的强度及方向
强度:
G
=
G
x
2
+
G
y
2
强度:G=\sqrt{G_{x}^{2}+G_{y}^{2}}
强度:G=Gx2+Gy2
方向:
θ
=
arctan
(
G
y
/
G
x
)
方向:\theta=\arctan \left(G_{y} / G_{x}\right)
方向:θ=arctan(Gy/Gx)
其中,Sobel算子为:
S
x
=
[
−
1
0
1
−
2
0
2
−
1
0
1
]
S
y
=
[
1
2
1
0
0
0
−
1
−
2
−
1
]
S_{x}=\left[\begin{array}{ccc} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{array}\right] S_{y}=\left[\begin{array}{ccc} 1 & 2 & 1 \\ 0 & 0 & 0 \\ -1 & -2 & -1 \end{array}\right]
Sx=
−1−2−1000121
Sy=
10−120−210−1
因此:
G
x
=
S
x
∗
A
=
[
−
1
0
1
−
2
0
2
−
1
0
1
]
∗
[
a
b
c
d
e
f
g
h
i
]
=
sum
(
[
−
a
0
c
−
2
d
0
2
f
−
g
0
i
]
)
G_{x}=S_{x} * A=\left[\begin{array}{ccc} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{array}\right] *\left[\begin{array}{lll} a & b & c \\ d & e & f \\ g & h & i \end{array}\right]=\operatorname{sum}\left(\left[\begin{array}{ccc} -a & 0 & c \\ -2 d & 0 & 2 f \\ -g & 0 & i \end{array}\right]\right)
Gx=Sx∗A=
−1−2−1000121
∗
adgbehcfi
=sum
−a−2d−g000c2fi
G y = S y ∗ A = [ 1 2 1 0 0 0 − 1 − 2 − 1 ] ∗ [ a b c d e f g h i ] = sum ( [ a 2 b c 0 0 0 − g − 2 h − i ] ) G_{y}=S_{y} * A=\left[\begin{array}{ccc} 1 & 2 & 1 \\ 0 & 0 & 0 \\ -1 & -2 & -1 \end{array}\right] *\left[\begin{array}{lll} a & b & c \\ d & e & f \\ g & h & i \end{array}\right]=\operatorname{sum}\left(\left[\begin{array}{ccc} a & 2 b & c \\ 0 & 0 & 0 \\ -g & -2 h & -i \end{array}\right]\right) Gy=Sy∗A= 10−120−210−1 ∗ adgbehcfi =sum a0−g2b0−2hc0−i
5.2 非极大值抑制
属于一种边缘稀疏技术
作用:主要作用就是构建“瘦”边
效果:非极大值抑制可以将局部最大值之外的所有梯度值抑制为0
其构建过程:
将当前像素的梯度强度与沿着正负梯度方向上的两个像素进行比较
如果当前像素的梯度强度 > 另外两个像素,则该像素点保留为边缘点
否则该像素点被抑制为0
5.3 双阈值检测
在进行非极大值抑制后,剩余的像素可以更准确地表示图像中的实际边缘,但是有可能还是存在一些噪音数据形成的边缘像素,所以需要使用弱梯度值来过滤这些非实际的边缘像素,并保留高梯度的实际边缘值
像素边缘的梯度值 > 高阈值,标记为强边缘像素
高阈值 > 像素边缘的梯度值 > 低阈值,标记为弱边缘像素
像素边缘的梯度值 < 低阈值,则会将其抑制
5.4 抑制孤立弱边缘
查看弱边缘像素及其周边的八个邻域像素:
只要其中有一个为强边缘像素/真实边缘像素,则该弱边缘点被保留为真实边缘/强边缘像素
算法原理:真实的弱边缘像素一定是连接强边缘像素点的
二. 轮廓信息
轮廓信息可以简单的理解为从图像中获取图像曲线的连接点信息,在目标检测、目标识别等业务场景中,具有一定的效果
轮廓信息就是从图像中获取图像边缘信息
1. 获取轮廓信息
contours, hierarchy = cv.findContours(image, mode, method[, contours[, hierarchy[, offset]]])
参数:
image:
输入的单通道图像矩阵
通常是经过边缘检测算子处理的二值图像
contours:
双重向量
其中每个元素包含由连续的Point点构成的点的集合,代表一个轮廓
有多少轮廓,这个向量就有多少元素
hierarchy:
包含4个整型的向量,定义了图像中各个轮廓之间的等级关系
mode:
定义轮廓的检索模式
CV_RETR_EXTERNAL:只检测最外围轮廓,内围轮廓被忽略
CV_RETR_LIST:检测所有轮廓,包括内围和外围轮廓,但检测到的轮廓不建立等级关系,彼此之间独立
CV_RETR_CCOMP:检测所有轮廓,并建立两个等级的轮廓层次关系;顶层是外部轮廓,底层是内部轮廓
CV_RETR_TREE:检测所有轮廓,并建立完整的等级树状结构,每个轮廓都有相应的父轮廓或子轮廓
method:
定义轮廓的近似方法
CV_CHAIN_APPROX_NONE:存储所有轮廓点,即不进行任何近似
CV_CHAIN_APPROX_SIMPLE:仅存储轮廓的拐点信息,即对于一条直线上的点而言,仅仅保留端点信息
CV_CHAIN_APPROX_TC89_L1:使用Teh-Chin链逼近算法,将轮廓近似为一条折线
CV_CHAIN_APPROX_TC89_KCOS:使用Teh-Chin链逼近算法,将轮廓近似为一条曲线
offset:是可选参数,表示轮廓点相对于原始图像的偏移量
返回值:contours和hierarchy
操作:
先对图像进行预处理:转为灰度图像,阈值分割或边缘检测算法来获取二值图像
随后使用该函数进行检测和提取图像中的轮廓,为后续的图像分析、目标识别或形状匹配等任务提供基础
2. 画轮廓
cv.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset]]]]])
参数:
image:输入单通道图像矩阵,通常是经过边缘检测算子处理的二值图像
contours:双重向量
contourIdx:
要绘制的轮廓的索引
如果为负数,则绘制所有轮廓
color:表示绘制轮廓的颜色
thickness:
绘制轮廓的线条粗细
如果为负数,则填充轮廓内部
lineType: 表示绘制轮廓的线条类型,如:实线、虚线等
hierarchy:包含4个整型的向量,定义了图像中各个轮廓之间的等级关系
maxLevel:
绘制轮廓的最大层级
如果为0,则只绘制指定索引的轮廓
如果大于0,则绘制指定索引及其子轮廓
offset:可选参数,表示轮廓点相对于原始图像的偏移量
作用:在图像中直观地显示轮廓信息







![[NSSCTF]-Reverse:[HUBUCTF 2022 新生赛]simple_RE(base64换表)](https://img-blog.csdnimg.cn/direct/11d3b83594fc4c14bd95e1ea60157eb9.png)